Early in the new year I will begin shipping the new BlueFlyVario Bluetooth_USB_v12 model. You can pre-order from today, but shipping will not commence until mid Jan 2017 when I have completed production of the first batch. In this short blog post I will describe what to expect from the new model. A more comprehensive post will accompany the first shipments which will describe assembly and configuration.

New Features
The v12 model is an evolution of the v11. The main change is the addition of a USB data connection on the same board as Bluetooth, but there are many other little changes:
What stays the same
Other Models
New Features
The v12 model is an evolution of the v11. The main change is the addition of a USB data connection on the same board as Bluetooth, but there are many other little changes:
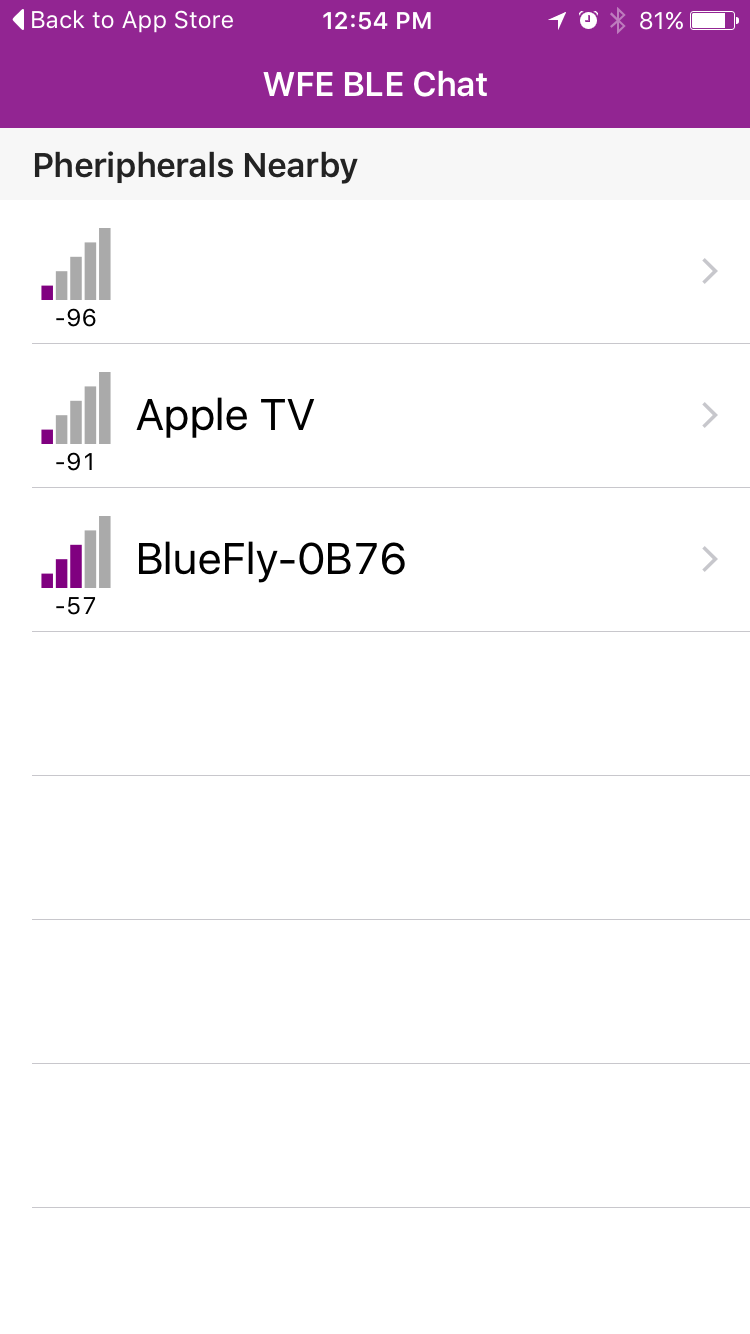
- The V12 adds a FT230x USB-serial chip to the board to allow the USB connector to be used for more than just charging. This will simplify adjusting settings using Windows, and allow for a wider range of compatibility. This feature included adding an analog switch to manage when UART data is sent via Bluetooth and USB. It works like this:
- If Bluetooth is not connected data is only sent and received from the Bluefly via the USB-serial chip.
- If Bluetooth is connected then data is sent to both the Bluetooth and USB-serial connection, but only received from devices connected via the Bluetooth connection.
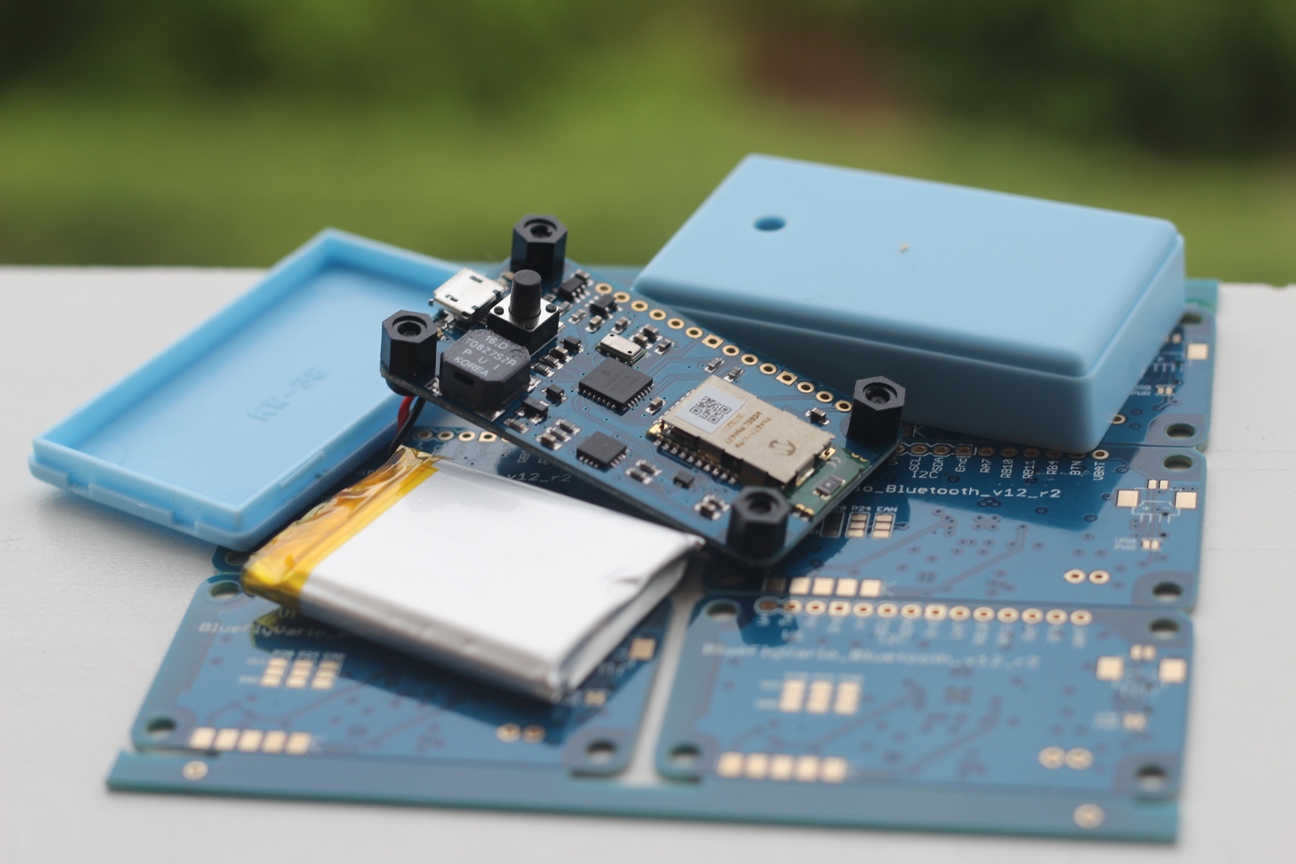
- The V12 board was lengthened by a few mm to allow for the extra space needed for the new components. It now takes up almost the complete length of the case.
- Power consumption is reduced by about 30% when not connected via Bluetooth. This was achieved by changing the way the RN4677 Bluetooth Module is disabled after the bluetoothSecondsWait timeout.
- The battery will be upgraded from 600mAh to 750mAh, taking up all of the spare space in the case. This makes for a snug fit and reduces the need for packing.
- The LED's have all been moved near the USB connector.
- The speaker has been rotated by 90 degrees, which will allow a small hole to be drilled in the side of the case if you really want to maximize the volume.
- All spare pins from the micro-controller, the button, battery voltage, etc are now all exposed in one row of headers. This will simplify hacking and will allow for things like an analog voltage input to be sensed.
What stays the same
- The case and standoffs are the same as the v11, as is the micro-controller, pressure sensor, RN4677 Bluetooth module, and supporting components.
- All of the hardware settings options, although I will be changing the defaults to the most common settings
- The price, almost... I had to add a few dollars to take into account the cost of the FT230x USB chip and new analog switch.
Other Models
- The BlueFlyVario_Bluetooth_USB_v12 will will replace the BlueFlyVario_Bluetooth_v11. The v11 model is now almost out of stock and I am no longer accepting orders for it.
- The BlueFlyVario_TTL_GPS_v11 remains the current model for connecting to a Kobo via TTL. I am some months away from considering what updates I will do to that model. The main change in v12 - the addition of USB to the Bluetooth model, is not applicable to the TTL model.
- The BlueFlyVario_USB_v11 and BlueFlyVario_USB_GPS_v11 remain current if you do not need a Bluetooth connection.
- The v11 shields are still available, and are electrically compatible with the v12, but the pins do not exactly match the new headers.